Elements of Riemannian Geometry
 A geodesic is commonly a curve representing in some sense the
shortest path between two points in a surface, or more generally in
a Riemannian manifold
A geodesic is commonly a curve representing in some sense the
shortest path between two points in a surface, or more generally in
a Riemannian manifold
We saw that manifolds are sets whose subsets have a bijective mapping to subsets of $\mathbb{R}^n$. As there is a natural differentiable structure on $\mathbb{R}^n$ the manifold hence inherits a diffentiable structure on it too.
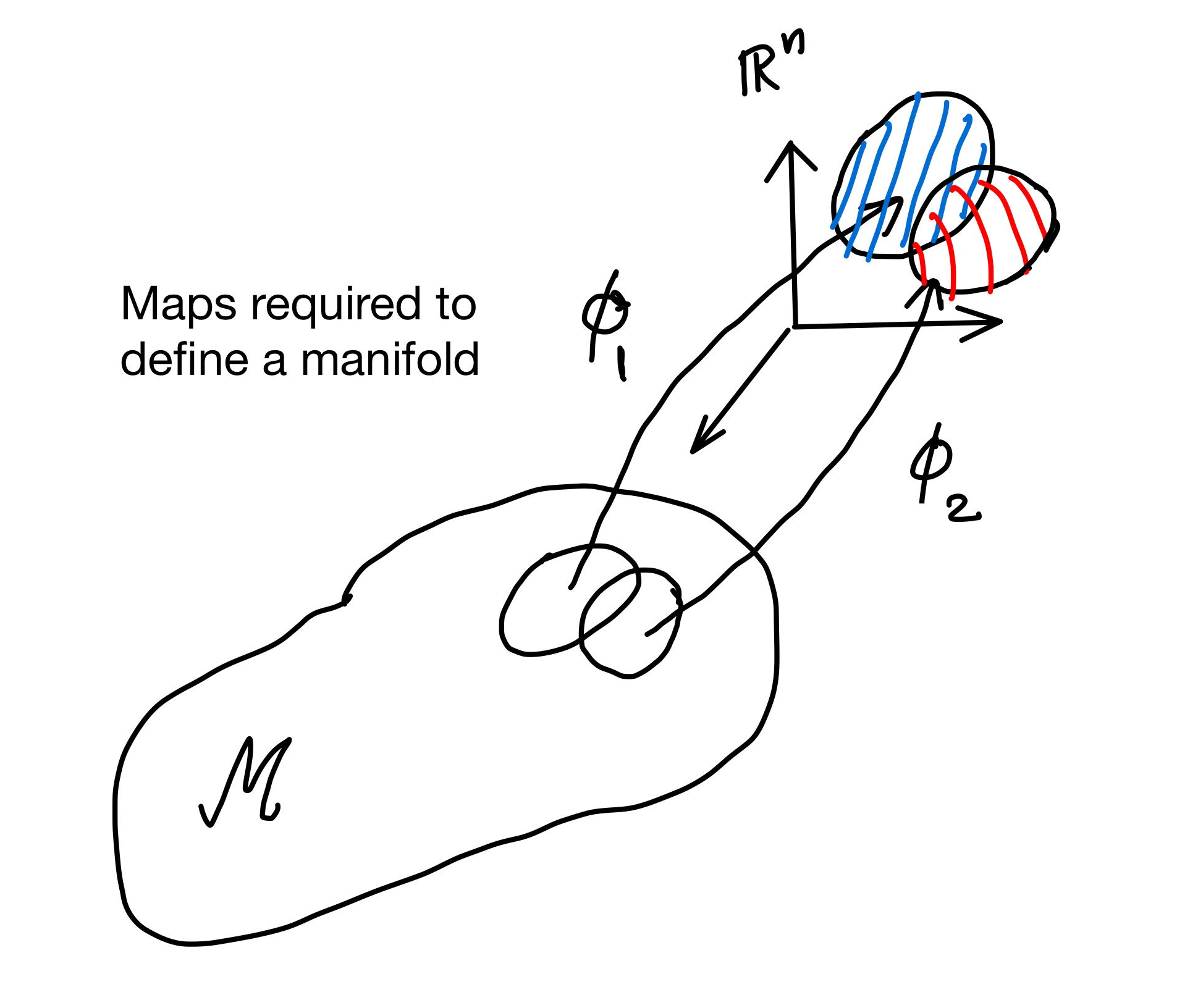
Figure: Map for Manifolds
Now now can thus import the concept of "distance" in $\mathbb{R}^n$ to the manifold $\mathcal{M}$ via the existence of this bijection.
The metric (which is a rank-2 symmetric tensor) is given by the existence of the symmetric form :
where $G $ is a symmetric and invertible matrix representing the metric $g_{ij}$.
Let us consider a simple example:
In the first quadrant in the $xy$ plane we can introduce the coordinates $(u,v)$ :
So that $ dx= \frac{1}{2} \sqrt{\frac{u}{v}}( \frac{du}{u} - \frac{dv}{v})$ and $dy = \sqrt{uv}( \frac{du}{u} + \frac{dv}{v})$
Plugging this back into $ds^2 = dx^2 + dy^2 $ and carrying out the standard algebra one ends up with the matrix for the
The presence of a metric thus allows us to define the arc length along a curve $\pmb{x} = \pmb{x}(\tau)$, where $\tau$ is the parameter along the arc:
An interesting property to note that this expression is invariant under the reparameterization $\tau \rightarrow \tau'$ , establishing that we are indeed measuring something geometrical related to the curve.
The Geodesic
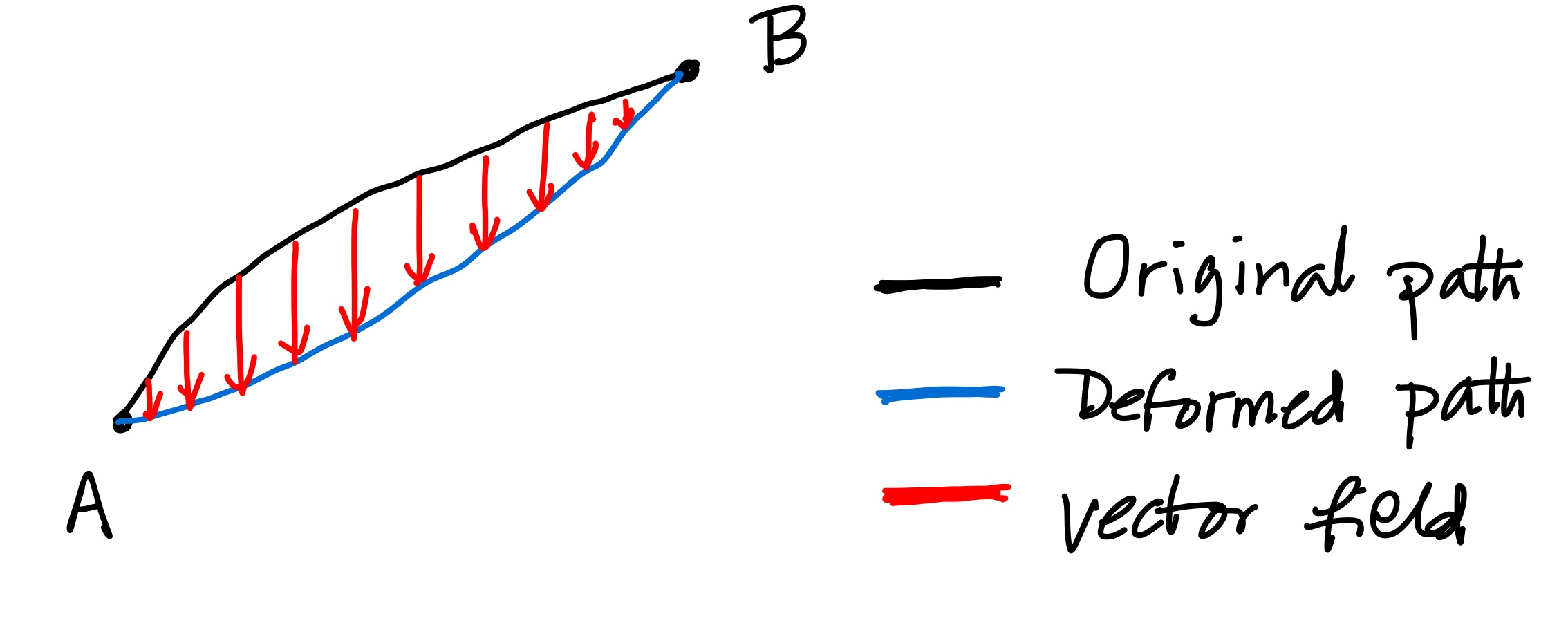
Our expression (\ref{length}) is valid for any curve. However if one is interested in the shortest curve ( which is known as geodesic) between two points, one has to minimize the expression (\ref{length}) under a local change
in the function $\pmb{x} : \tau \rightarrow \mathbb{R}^n$. Note that
- We can think of the variation, $\delta \pmb{x} = \pmb{x'} - \pmb{x} \equiv \epsilon ~\pmb{v}$ as a vector field defined over the curve in question.
- The infinitesimal parameter $\epsilon$ is introduced just to emphasize that we will only keep terms first order in $\epsilon$ in our manipulations.
Let us rewrite (\ref{length}) as
If $s $ is a local extrema ( just like 1D calculus ) its change under the change (\ref{varia}) will be zero: $ \delta s =0$. Thus
Now this equation shows that if we extremize instead the functional:
i.e. we will end up with the same local minima. One can see
Now some math gymnastics ( Sorry! Tokyo Olympics is on ):
So that
The second term can be integrated by parts :
The "boundary" term vanishes as $\delta \pmb{x}$ vanish there.
So the geodesic equation can be obtained from the condition:
As $\dot{x}^i \dot{x}^j $ is symmetric under the exchange of the indices $ i \leftrightarrow j$ we can rewrite the 2nd term
Putting all of these together
As $G=\{g_{jk}\}$ is an invertible matrix, we can remove the $g_{jk}$ from the first term :
where
which is known as Christoffel's (second) symbol. Despite carrying several indices it is not a tensor!
Note $g^{ij}$ are the matrix elements of the inverse $G^{-1}$.